يتأثر تأثير اللحام بالروبوتات بعدة جوانب. سيواجه العديد من العملاء بعض المشاكل قبل إتقان استخدام روبوتات اللحام. في الأساس، تحدث هذه المشاكل بسبب سوء التشغيل أو إعدادات الروبوت الخاطئة، ويمكن حلها بإجراء التعديلات المناسبة. بعد ذلك، سيستعرض المحرر بعض المشاكل الشائعة عند استخدام روبوتات لحام يونهوا والحلول ذات الصلة.
1. فشل بدء القوس أثناء اللحام
1. القوس لم يبدأ بعد
السبب: لا يوجد أمر بدء القوس المقابل قبل تنفيذ أمر إنهاء القوس في البرنامج المحرر
طريقة المعالجة: تحقق مما إذا كان سيتم إضافة أمر إنهاء قوس واحد إضافي أو أمر بدء قوس واحد أقل
2. فشل في بدء القوس، اكتشاف الإشارة خاطئ
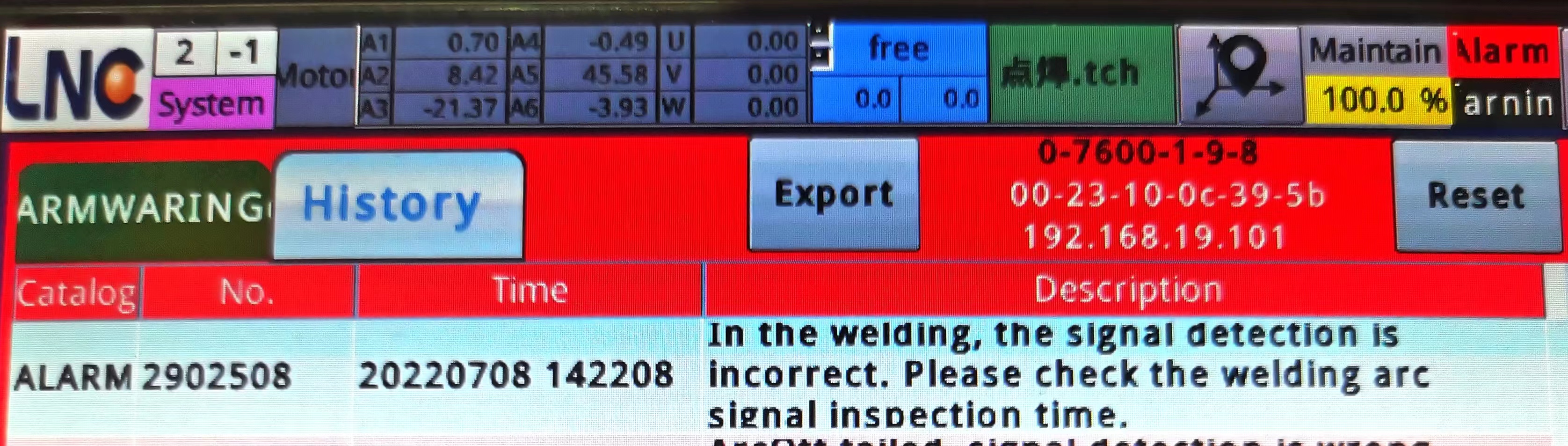
يقترب:
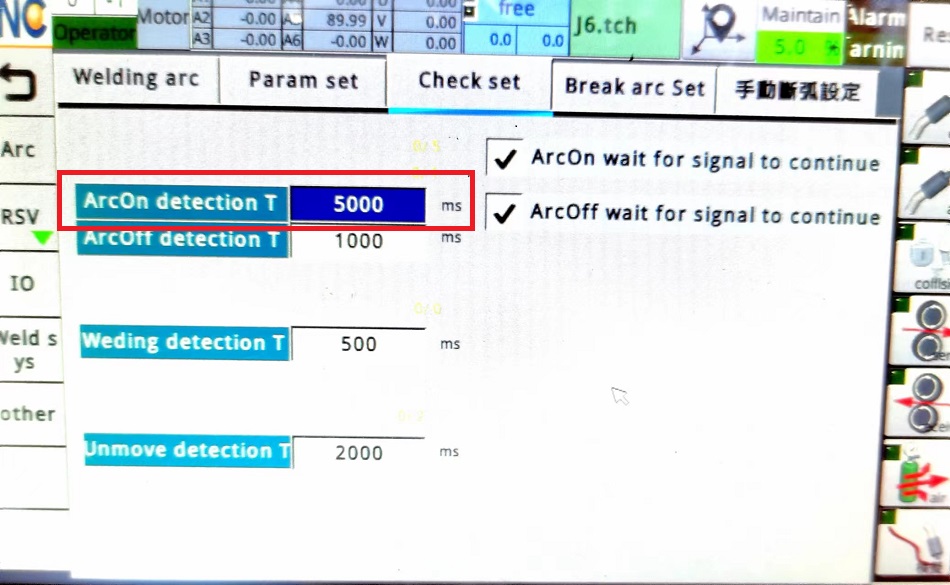
١) تحقق من إعداد وقت انقطاع اللحام في صفحة المعلمات. عادةً، يُنصح بضبط الوقت على ٥٠٠٠ مللي ثانية.
2) تحقق مما إذا كانت إشارة آلة اللحام تنتقل بنجاح إلى النظام
3) تحقق مما إذا كانت قطعة العمل مؤرضة
3. سلك محترق بالقوس الكهربائي
سبب:
1) عدم تطابق التيار والجهد
طريقة المعالجة: نحتاج إلى ضبط التيار والجهد المناسبين وفقًا للسمك الفعلي لقطعة العمل وآلة اللحام
2) طول سلك اللحام طويل جدًا
طريقة المعالجة: بشكل عام، يكون طول سلك اللحام من 10 إلى 15 مرة قطر سلك اللحام، ويتم اختيار الطول المناسب لسلك اللحام وفقًا لقطر سلك اللحام.

يؤدي التيار القليل جدًا إلى لحامات غير متساوية

التيار والجهد الطبيعيان، اللحام الجميل والثابت

سوف تقوم نهاية شعلة اللحام بتشكيل السلك

سلك نهاية شعلة اللحام في حالة جيدة بعد اللحام العادي
4. تحدث ظاهرة إطفاء القوس الكهربائي تلقائيًا بعد حدوث القوس الكهربائي
الحل: تحقق ما إذا كانت هناك مشكلة في إعداد وقت المعلمة الذي لا يتحرك، وتحقق ما إذا كان شعلة اللحام قد تحركت.
2. يحدث كسر القوس أثناء اللحام
سبب:
1. إذا لم يلامس سلك اللحام قطعة العمل، فسيتم تشغيل إنذار كسر القوس
طريقة المعالجة: أعد ضبط موضع سلك اللحام وقطعة العمل، بحيث يلامس سلك اللحام قطعة العمل بالكامل أثناء عملية اللحام. (لكن لا يجب أن يكون قريبًا جدًا من قطعة العمل، فقد يؤدي ذلك إلى اللحام من خلال قطعة العمل).
2. يؤدي مسار اللحام غير المعقول إلى ارتفاع رأس البندقية تلقائيًا بسبب الاصطدام
الحل: إعادة تعيين مسار اللحام
3. الأسلاك الموجبة والسالبة لآلة اللحام على اتصال ضعيف
طريقة العلاج: التحقق من حالة الأسلاك الموجبة والسالبة
3. أسباب فشل نهاية القوس بعد اللحام
1. فشل القوس، خطأ في اكتشاف الإشارة
السبب: لم تستقبل ماكينة اللحام الإشارة من الروبوت، مما تسبب في فشل الروبوت في إغلاق القوس.
يقترب:
(1) تحقق مما إذا كانت معلمات الإعداد معقولة
(2) تحقق من إشارة الإدخال/الإخراج، وتأكد من عدم وجود أي خلل في إشارة نقطة النهاية I. إذا استمرت إشارة نقطة النهاية I في الظهور، فستكون الإشارة قيد التشغيل.
(3) تحقق مما إذا كان هناك ماس كهربائي في الخط وما إذا كان السلك الأرضي متصلاً بشكل غير طبيعي
2. لا يتم تعيين أمر إيقاف القوس بعد ضربة القوس

السبب: عند حدوث هذا التنبيه على قلادة التدريس، تحقق مما إذا كنت قد نسيت إضافة أمر إنهاء القوس
طريقة المعالجة: إضافة أمر إنهاء القوس بعد أمر بدء القوس في البرنامج
يتناول هذا العدد بشكل رئيسي مشاكل بدء القوس الكهربائي، وكسره، وإنهائه في روبوت اللحام "يونهوا" أثناء عملية اللحام. في حال مواجهة أي مشاكل أثناء الاستخدام، يُرجى مراجعة الحلول. في حال عدم حلها، يُرجى التواصل مع فنيي "يونهوا" في الوقت المناسب.
إذا كنت تريد معرفة المزيد من المشاكل والحلول الشائعة لروبوت Yunhua، يرجى الانتباه إلى الحساب الرسمي لروبوت Yunhua.
روبوت اللحام "يونهوا" هو روبوت آلي يجمع بين اللحام متعدد الوظائف، مثل اللحام المحمي بالغاز، ولحام قوس الأرجون، وقطع البلازما، واللحام بالليزر. يتميز بمرونة عالية، وقابلية تكيف عالية، وكفاءة لحام عالية، وجودة لحام مستقرة، ويمكن استخدامه على نطاق واسع في مجالات متنوعة، مثل تصنيع الآلات، وصناعة السيارات، والإلكترونيات الدقيقة، وتعدين الفحم، وغيرها.
وقت النشر: ١٥ يوليو ٢٠٢٢



